
①

②
③

④
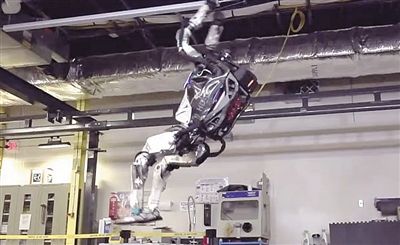
機器人Atlas后空翻視頻截圖
大臂屈肘,前臂在空中劃出一個優美的“扇面”之后舉過頭頂,Atlas的整個身體被帶動起來,腳掌蹬地,大腿力量爆發,一個后空翻,落地完美。
近日,波士頓動力發布了一段機器人后空翻的視頻,記者一直在猜想體操比賽“神解說”金寶成會給這段動作干淨、沒有拖沓的表演估分多少。
無論分值多少,“震驚世界”是肯定的了——機器習得的人類本領又多了一個,而且還是一個大部分人不能完成的高“顯示度”的身體技能,這勢必會引起大部分人的注目。科技日報記者為此採訪了東南大學儀器科學與工程學院院長宋愛國、德國人工智能研究中心科學總監菲利普·斯魯薩力克,對Atlas的動作進行技術分解,梳理一下它的背后有哪些技術在支撐發力。
機器人后空翻有多難
一個后空翻動作, 最難的是哪一步?起跳、翻轉、落地,還是穩住?
“要有力量”,宋愛國沒有直接回答記者的問題,他說,想翻轉,跳起來了,但是力量不夠大,就不能給翻轉足夠的時間,也談不上動態的調整,因此動力是后空翻能夠完成的基礎。
第三代Atlas並不是告別外接電源的第一代。資料記載,波士頓動力2016年推出的第二代Atlas就配備了內置電池驅動,不再需要外接電源獲取動力。
“瞬間給力會更大,就像人要調集自己肌肉內部的ATP儲能一樣,翻轉開始時的爆發力對電池的要求更高。”宋愛國提醒,在關注傳感器、算法等人工智能研究的同時,也要關注動力等基礎研發,“機器人的研制是一個全鏈條的工作”。
“在機器人的體內會有姿態傳感器,也就是陀螺儀。”宋愛國說,通過陀螺儀,它能夠知曉自己的空間方位。與生物判斷自己的方位和姿態不同,“人類的平衡感知集中在小腦部位。而機器人的平衡感知是分布式的,通過陀螺儀分布在它的軀干上”。
“它一跳,腿部跟著擺動上來,然后翻轉,整個身體的姿態也隨之調整。”宋愛國說,“姿態傳感器獲取了各部位的旋轉狀況,將信息傳遞到中央處理器,進行控制決策。”
“控制的實施要快,因此對算法的有效性要求很高。”宋愛國說。決策的具體過程可分解為:將姿態轉換成數據,進行計算處理,找到應對策略,傳遞給不同部分,控制姿態,獲取平衡。可以想見后空翻的所有計算要在“慢飛行”的情形下完成,因此控制算法優化極考驗功底。
“我有幸親眼見過Atlas,很多學校都在拿這款機器人做硬件平台,然后研究控制算法。”“知乎”上一位機器人領域的研究者介紹,波士頓動力控制算法已成為院校的典型范例,被用作教材。
此外,落地的平衡控制是較難完成的環節。這一過程中,剛性接觸和柔性接觸分別要採用不同的模型,還要設計二者的兼容模型。宋愛國說,為了給這個大家伙輸出足夠的動力,也為了減少落地對它的緩沖,Atlas的腿部裝了液壓伺服器。“兩個細長的桶狀裝置,裝在腿部,將剛性接觸轉化為柔性接觸。”
“目前的驅動部件,有電機、有氣壓、有液壓,后兩種能夠降振減壓”,宋愛國說,它們不會因為瞬間沖擊力的增加而爆掉,而且輸出動力也足。但是,在算法控制上,液壓伺服的數學模型是非線性的,力量不會隨著電壓的增長而線性增長,控制的精度會低一點,宋愛國說:“機器人的腳部也會安裝多維力傳感器,對腳步的受力狀態進行輔助控制。”
嚴苛“訓練”為哪般
隨著Atlas后空翻的走紅,波士頓動力“虐待”機器人的一些老視頻也被網民扒拉出來。視頻中,測試人員不是對機器人猛踹,就是突然出現撞擊機器人,“這不是欺負,是為了檢測機器人的穩定性能”。智能一點技術人員萬俊說。
“可以不必這樣。”菲利普·斯魯薩力克主要從事計算機圖形學領域的研究,能夠為各種應用領域的模擬、分析、可視化、訓練和決策創建3D環境,他表示,對機器人的訓練可以通過虛擬場景進行。
“我沒有加入到這個研究團隊中,不是很了解他們是如何建模和調整的”,菲利普的回答透著德國人的嚴謹,但是人工智能的深度學習必須要從經驗中得來。
用數據替代現實,能夠給機器人足夠的深度學習數據。“我們已經在開展和機器人非常相似的無人駕駛汽車的訓練,利用虛擬3D環境為汽車調整參數、算法和模型設計。”菲利普說。
“並不是所有的環境在現實中都能找到,例如火星環境、戰爭環境等。”菲利普說。機器人的研制初衷是代替人類進入嚴酷的環境,這也是波士頓動力公司受軍方資助的原因之一。
機器人能不能在這些環境中勝任呢?“創造出真實環境和多樣的場景驗証,花費巨大,而且也難以實現”,菲利普說,虛擬3D環境的設計是解決之道。
這涉及到除了翻跟頭之外的另一個問題——什麼時候翻跟頭?
“發布的這個機器人,現在只是能夠完成人類給定的指令,還不能自己判斷什麼時候后空翻”,宋愛國說,在完成高難度動作之外,機器人還需要自己判斷。
例如,一個孩子從路上突然出現,機器人能不能判斷出避讓或翻過去。“它們不僅要能判斷大孩子、小孩子、打傘的孩子或者追球的孩子,一旦遇到‘孩子是翻著跟頭過去的’這種罕見的模式,也要判斷出來。”菲利普說。
分布式的、沉浸式的、協作和交互式的3D環境,將給機器人一個個虛擬世界,隻有當它們通過不同場景背后一套套“模擬試卷”的考驗后,才能夠被評判為:智能系統安全。
我國研究正起步
關注Atlas的業內人士,也很樂於八卦波士頓動力公司的波折經歷——它早期在軍方拿到了巨額的研究經費,后被谷歌收購,之后又被谷歌賣給日本軟銀公司。支持經費是其中的重要因素之一。
“波士頓動力特別有錢”,有人在“知乎”爆料稱,認識在該公司供職過的研究人員,得知波士頓動力每周都要做機器人實驗,把機器人搞壞,然后發現問題並改正,“因為有錢、有經驗,所以他們一周之內就能把機器人修好,下一周繼續做,全年無休。”
可見,仿生機器人是個費錢又費工的研究。近年來,我國也在仿生機器人領域有了值得一提的研究。
今年4月百度主辦的創新挑戰賽上,南京大學、西南科技大學等聯合研發的“蜘蛛俠智能救援隊”亮相,能在復雜的路況中穩定行走,相互溝通協作且簡單自主運動。8月召開的機器人大會上,由清華大學計算機系研發的“數據機械手臂”,在人穿上帶有傳感器的手套后,機械手臂會“零延遲”同步響應動作。此外,中國科學技術大學、新鬆機器人公司等在四足機器人足球、7自由度協作機器人等方向都有相關研究進展。
宋愛國介紹,在軍方相關部門有進行四腿大狗的研究團隊,山東大學有研究兩腿直立行走的團隊,但與波士頓動力相比,我國的機器人研制深度和水平還有較大差距。(記者 張佳星)







 80秒看雪中武漢
80秒看雪中武漢


